Matrixrechnung
Begriffe und Definitionen
Als Matrix bezeichnet man Elemente aij, die in einem 2-dimensionalen rechteckigen Schema angeordnet sind. Besteht das Schema aus n-Zeilen und m-Spalten so spricht man von einer (n x m)-Matrix. Die Position eines Elements innerhalb der Matrix wird durch zwei Indizies gekennzeichnet. Der erste Index gibt die Zeilennummer und der zweite Index die Spaltennummer an. Die Nummerierung beginnt links oben in der Matrix und verläuft von links nach rechts bzw. von oben nach unten. Gilt für eine Matrix n = m so bezeichnet man die Matrix als quadratische Matrix.
Hauptdiagonale
Die Elemente der Matrix für deren Indizies gilt i = j, also die Elemente aii sind die Diagonalelemente. Ihre Gesamtheit bildet die Hauptdiagonale der Matrix. Die Elemente von links unten bis rechts oben werden als Nebendiagonale bezeichnet. Spricht man von den Hauptiagonalen so schließt man die Reihen parallel zur Hauptdigonalen mit ein. Dies gilt analog für die Nebendiagonalen.
Hier sind die Hauptdiagonalelemente rot dargestellt:
und die Nebendiagonalelemente grün:
Einheitsmatrix
Die Matrix bei der alle Elemente der Hauptdiagonale gleich 1 sind und alle anderen Elemente gleich 0 sind heißt Einheitsmatrix E.
Transponierte Matrix
Die an der Hauptdiagonalen gespiegelte Matrix wird als transponierte Matrix bezeichnet. Für eine Matrix A = ( aij ) ist die transponierte Matrix gegeben durch AT = ( aji ). Die transponierte einer transponierten Matrix ergibt die Matrix selbst d.h. A = (AT)T.
Determinante
Jeder quadratischen Matrix läßt sich eine eindeutige Zahl zuordnen, die als Determinante ( det(A) ) der Matrix bezeichnet wird.
wobei die Summe über alle Permutationen σ zu erstrecken ist. Man bildet also aus den Elementen von A alle möglichen Produkte zu je n-Elementen in der Weise, dass jedes der Produkte aus jeder Zeile und Spalte genau ein Element enthält. Diese Produkte werden addiert und die Summe ist die Determinante von A. Das Vorzeichen der Summanden ist positiv bei geraden Permutationen und negativ bei ungeraden Permutationen.
Inverse Matrix
Die inverse Matrix A-1 ist durch folgende Gleichung definiert
Matrizen, für die eine Inverse existiert bezeichnet man als reguläre Matrizen. Die Determinante einer invertierbaren Matrix ist ungleich Null. Matrizen die keine Inverse haben als singuläre Matrizen.
Für die inverse Matrix gelten folgende Rechenregeln:
Die Berechnung der inversen Matrix A-1 erfolgt entweder mittels des Gauß-Jordan Algorithmus oder über die Adjunkte. Das Gauß-Jordan Verfahren überführt die Matrix (A|E) in die Form (E|A-1) aus der man A-1 direkt ablesen kann. Mit der Adjunkten und der Determinante kann die Inverse direkt angegeben werden.
Klassen von Matrizen
Eine quadratische Matrix A heißt symetrische Matrix, wenn gilt AT = A und eine schiefsymetrische Matrix, wenn gilt AT = -A. Eine orthogonale Matrix, wenn gilt AT = A-1
Adjunkte Matrix
Die Adjunkte der Matrix A wird so berechnet, dass für jedes Matrixelement aij eine Subdeterminante bestimmt wird, indem die Zeile i und die Spalte j entfernt werden. Der Wert dieser Determinante wird mit (-1)i+j multipliziert, was das Element i,j der adjungierten Matrix ergibt.
Rechenregeln für Matrizen
Die Matrizenmultiplikation ist assoziativ:
Die Matrizenmultiplikation und Matrizenaddition sind distributiv:
Für die Addition und Multiplikation mit reellen Zahlen λ, μ gilt:
und:
Es gibt Nullteiler d.h. Matrizen A ≠ 0 und B ≠ 0 für die gilt:
Für quadratische Matrizen gilt:
Matrizenaddition
Die Addition zweier Matrizen A und B erfolgt indem man die Elemente der Matrizen addiert. C = A + B mit ci,j = ai,j + bi,j
Rechner für die Addition zweier Matrizen:
|
+ |
|
|
= |
|
Rechner für die Addition und Subtraktion von NxM Matrizen: Matrixaddition und -subtraktion MxN
Matrizensubtraktion
Die Subtraktion zweier Matrizen A und B erfolgt indem man die Elemente der Matrizen subtrahiert. C = A - B mit ci,j = ai,j - bi,j
Rechner für die Subtraktion zweier Matrizen:
|
- |
|
|
= |
|
Rechner für die Addition und Subtraktion von NxM Matrizen: Matrixaddition und -subtraktion MxN
Multiplikation einer Matrix mit einem Skalar
Die Multiplikation einer Matrix mit einem Skalar λ erfolgt indem man jedes Matrixelemente mit dem Skalar multipliziert. λ ⋅ A = λ ⋅ ai,j
Matrixmultiplikation
Die Multiplikation zweier Matrizen A und B setzt voraus, dass die Anzahl der Spalten der ersten Matrix gleich der Anzahl der Zeilen der zweiten Matrix ist. Das Produkt ergibt sich indem man die Zeilen und Spaltenelemente multipliziert und aufsummiert. Für das erste Element der Ergebnismatrix werden die Elemente der ersten Zeile der ersten Matrix mit den Elementen der ersten Spalte der zweiten Matrix multipliziert und aufsummiert. Für die weiteren Elemente analog mit den weiteren Zeilen und Spalten.
Rechner für die Multiplikation von NxM Matrizen: Matrixmultiplikation
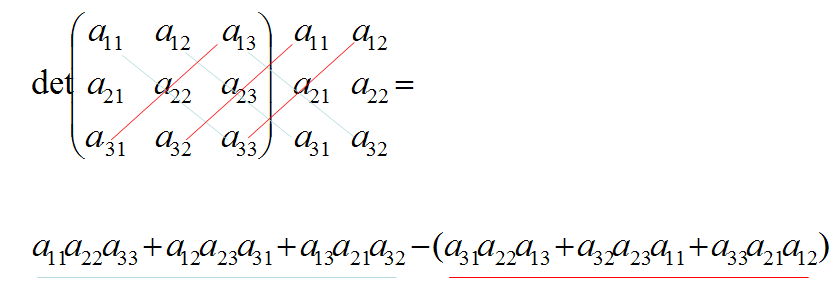
Sarrus Regel
Die Determinante einer quadratischen 3x3 Matrix wird nach der Sarrus-Regel berechnet indem man die Summe der Produkte der Hauptdiagonalen von der Summe der Produkte der Nebendiagonalen subtrahiert.
Ein allgemeiner Determinantenrechner: Determinante NxN
Berechnung der inversen Matrix nach Gauß-Jordan
Gesucht ist die inverse Matrix A-1 zur Matrix A. Dazu wird zunächst mit der Einheitsmatrix E die Matrix (A|E) gebildet. Durch geeignete Umformungen gelang man zu der Form (E|A-1). Im folgenden werden die erforderlichen Schritte an einem Beispiel durchgeführt.
Ansatz nach Gauss-Jordan
Ziel ist es durch geeignete Umformungen die Matrix in die folgende Form zu überführen.
Rechner für die inverse Matrix: Inverse Matrix
Berechnung der Adjunkten einer Matrix
Die Adjunkte der Matrix A wird so berechnet, dass für jedes Matrixelement aij eine Subdeterminante bestimmt wird, indem die Zeile i und die Spalte j entfernt werden. Der Wert dieser Determinante wird mit (-1)i+j multipliziert, was das Element i,j der adjungierten Matrix ergibt.
Das Ergebnis ist die adjungierte Matrix.
Rechner für die Adjunkte: Adjunkte Matrix
Multiplikation eines Vektors mit einer Matrix
Das Produkt einer Matrix mit einem Vektor ist eine lineare Abbildung. Erklärt ist die Multiplikation wenn die Anzahl der Spalten der Matrix gleich der Anzahl der Elemente des Vektors ist. Das Ergebnis ist ein Vektor dessen Anzahl der Komponenten der Anzahl der Zeilen der Matrix entspricht. D.h. das z.B. eine Matrix mit 2 Zeilen einen Vektor immer auf einen Vektor mit zwei Komponenten abbildet.
Rechner für das Matrix-Vektorprodukt: Matrix-Vektorprodukt
Berechnung des Eigenwerts
Die Gleichung
läßt sich umformen in das homogene Gleichungssystem
Das Gleichungssystem hat genau dann eine nichttriviale Lösung, wenn die Determinante verschwindet. D.h. wenn gilt
Das Polynom heißt charakteristisches Polynom von A und die Gleichung die charakteristische Gleichung von A. Ist λi ein Eigenwert von A so sind die Lösungen der charakteristischen Gleichung die Eigenvektoren von A zum Eigenwert λi.
Rechner für Eigenwerte: Eigenwerte
Weitere Online-Rechner
Liste weiterer Seiten:
Rechner
Matrixrechner.
Index Matrixsubtraktion MxN Matrixmultiplikation Matrix-Vektor-Produkt Inverse Matrix Adjunkte Matrix QR-ZerlegungDeterminantenrechner mit schrittweiser Berechnung der Determinante.
Determinante 2x2 Determinante 3x3 Determinante 3x3 symbolisch Determinante 4x4 Determinante 4x4 symbolisch Determinante 5x5 Determinante NxNRegeln
Rechenregeln.
Determinantenrechnung Vektorrechnung EigenwerteGrafische Berechnungen.
Vektoraddition Vektorsubtraktion Matrix-Vektorprodukt Skalarprodukt